2018金磚+大賽之首屆“移動機器人”賽項技術規程(精簡版)
一、競賽項目
賽項編號:JZ004
賽項名稱:移動機器人
賽項組別:中職組、高校組、教師組
賽項歸屬產業:智能制造、機器人產業、新興技術產業
賽項類型:國際級競賽
二、競賽目的
以“中國制造2025”為背景,針對裝備制造業轉型升級對崗位技能提升的要求,面向全國中等職業學校和高等院校機器人工程、工業機器人技術、機器人應用與維護、機電一體化和自動化技術等專業,圍繞真實工作過程、任務和要求設計競賽內容,重點考察選手的實際動手能力、規范操作和創新創意水平,檢驗參賽選手的綜合職業能力。通過技能競賽促進中等職業學校和高等院校機器人相關專業發展、課程建設和人才培養質量,為世界技能大賽移動機器人賽項助力,解決機器人產業迅猛增長與專業人才嚴重短缺的矛盾,提升機器人技能型人才水平和數量,服務智能制造領域,為探索申請世界技能大賽開設金磚板塊積累成果和經驗。
三、競賽內容
(一)競賽方式
競賽為團體賽,每隊由2名選手組成。整個競賽過程包括:第一階段“實操競賽”和第二階段“答辯展示”兩個方面內容。學生組實操競賽與答辯展示在總成績中權重分別為90%和10%,教師組實操競賽與答辯展示在總成績中權重分別占70%和30%。
每所院校每個組別限報1支參賽隊,參賽選手為同一學校,不允許跨校組隊;決賽時中職組、高校組、教師組參賽隊伍,每組均不超過40支隊伍。
天津博諾機器人技術有限公司將針對競賽內容分批組織培訓,每次培訓結束,由賽項組委會根據專家組命題題庫,抽取試題和邀請第三方裁判,對培訓學員進行考試選撥,根據每批次考試結果,由賽項組委會通知公示晉級決賽的隊伍名單。
(二)實操競賽內容
參賽選手在270分鐘內,根據賽場提供的任務書和有關資料,完成競賽任務。
1.移動機器人整體裝調任務。
2.移動機器人運動控制調試任務。
3.場地遙控運行任務。
4.移動機器人系統自動運行任務。
(三)答辯展示內容
學生組(含中職組與高校組)答辯展示環節,要求參賽選手(選1名代表)圍繞“移動機器人技術應用”這一主題,在10分鐘時間內進行技術文件展示及答辯匯報,主要考察選手在執行工作任務過程中的功能和結構、使用價值、節約成本、人性化設計、團隊合作、事故預防、環保性、創新性等八個方面的職業能力。
教師組(選1名代表)答辯展示采用說課形式,時間為15分鐘,內容與移動機器人相關即可,說課內容包含但不限于:課程教學目標和定位,學習情境,學習目標、教學內容、教學方法、教學過程、教學媒體、資源和環境選擇以及教學評價。該項目旨在考察教師對教學設計、課件制作、師范素養等師范技能的掌握程度。
所有參賽選手的技術文件(PPT、視頻等)由各參賽隊在賽前提前制作完成。
四、競賽方式
本賽項為團體賽,不計選手個人成績,統計參賽隊總成績進行排序。每支參賽隊由2名選手組成,指定1人為隊長,學生組競賽可以設置不超過2名指導教師,每隊設置領隊1名。
競賽采取多場次進行,由賽項組委會按照競賽流程組織各領隊參加公開抽簽,確定各隊參賽場次。參賽隊按照抽簽確定的參賽時段分批次進入競賽場地參賽。
五、技術規范
1.競賽標準
根據教育部中等職業學校和高等院校加工制造專業類教學指導方案,參照工業機器人裝調維修工、工業機器人操作調整工、工業機器人安全規范等國家職業技術標準要求實施,如表3所示。
表3 技術標準
| 序號 |
標準號 |
名稱 |
| 1 |
JX04-24-01 |
工業機器人裝調維修工 |
| 2 |
JX04-24-02 |
工業機器人操作調整工 |
| 3 |
GBT 26154-2010 |
裝配機器人通用技術條件標準 |
| 4 |
GB 11291-1997 |
工業機器人安全規范 |
| 5 |
SJ/T 10533-94 |
電子設備制造防靜電技術要求 |
| 6 |
JY 0001-2003 |
教學儀器設備產品一般質量要求 |
| 7 |
LD/T81.1-2006 |
職業技能實訓和鑒定設備通用技術規范 |
| 8 |
6-05-02-03 |
數控機床裝調維修工國家職業標準 |
| 9 |
6-08-04-02 |
電子設備裝接工國家職業標準 |
2.職業道德
(1)敬業愛崗,忠于職守,嚴于律已;
(2)刻苦學習,鉆研業務,善于觀察,勤于思考;
(3)認真負責,吃苦耐勞;
(4)遵守操作規程,安全、文明生產;
(5)著裝規范整潔,愛護設備,保持工作環境清潔有序。
3.相關知識與技能
(1)小型機器人的工作原理;
(2)小型機器人機械結構、安裝、檢測、調試;
(3)小型機器人控制系統原理、裝配、調試和故障排除;
(4)小型機器人應用程序編寫;
(5)小型機器人整機調試。
六、技術平臺
本次大賽的競賽平臺采用基于第44屆世界技能大賽研制的BNRT-MOB-44型移動機器人,競賽器材由組委會統一提供。每套設備由上百種零件組成。采用模塊化設計,具備通用型接口,可以根據需求組成不同結構形式,能激發學生創新思維,同時能夠滿足技能競賽要求。
移動機器人設備如圖1所示。

圖1 BNRT-MOB-44型移動機器人套件
1.配置工業級的鋁合金結構組件;
2.配置NImyRIO控制器、NI LabVIEW學生版軟件及工具包;
3.配置傳感器套件:智能相機、無線遙控手柄、USB-HUB、超聲波測距傳感器、陀螺儀、IR紅外傳感器、QTI傳感器、12V6800mAh的鋰電池和充電器、ON/OFF電源開關、電線和控制電路板;
4.配置帶編碼器的12V直流減速電機;
5.配置5V數字舵機。
6.配置4x60mm麥克納姆輪組件;
7.配置2x190mm的直線導軌和滑塊;
8.主控制器如圖2所示,直流供電范圍為6V~16V,易于上手使用、編程開發簡單,板載資源豐富:共有40條數字I/O線,支持SPI、PWM輸出、正交編碼器輸入、UART和I2C,以及8個單端模擬輸入,2個差分模擬輸入,4個單端模擬輸出和2個對地參考模擬輸出,方便通過編程控制連接各種傳感器及外圍設備;

圖2 主控制器實物圖
9.電機和傳感器控制板如圖3所示,包含直流減速電機控制模塊、電源模塊、光耦隔離模塊、6路電機驅動模塊、5路舵機驅動模塊、5路超聲波測距模塊、陀螺儀模塊、雙P34插針接口等方便控制和連接主控制器;
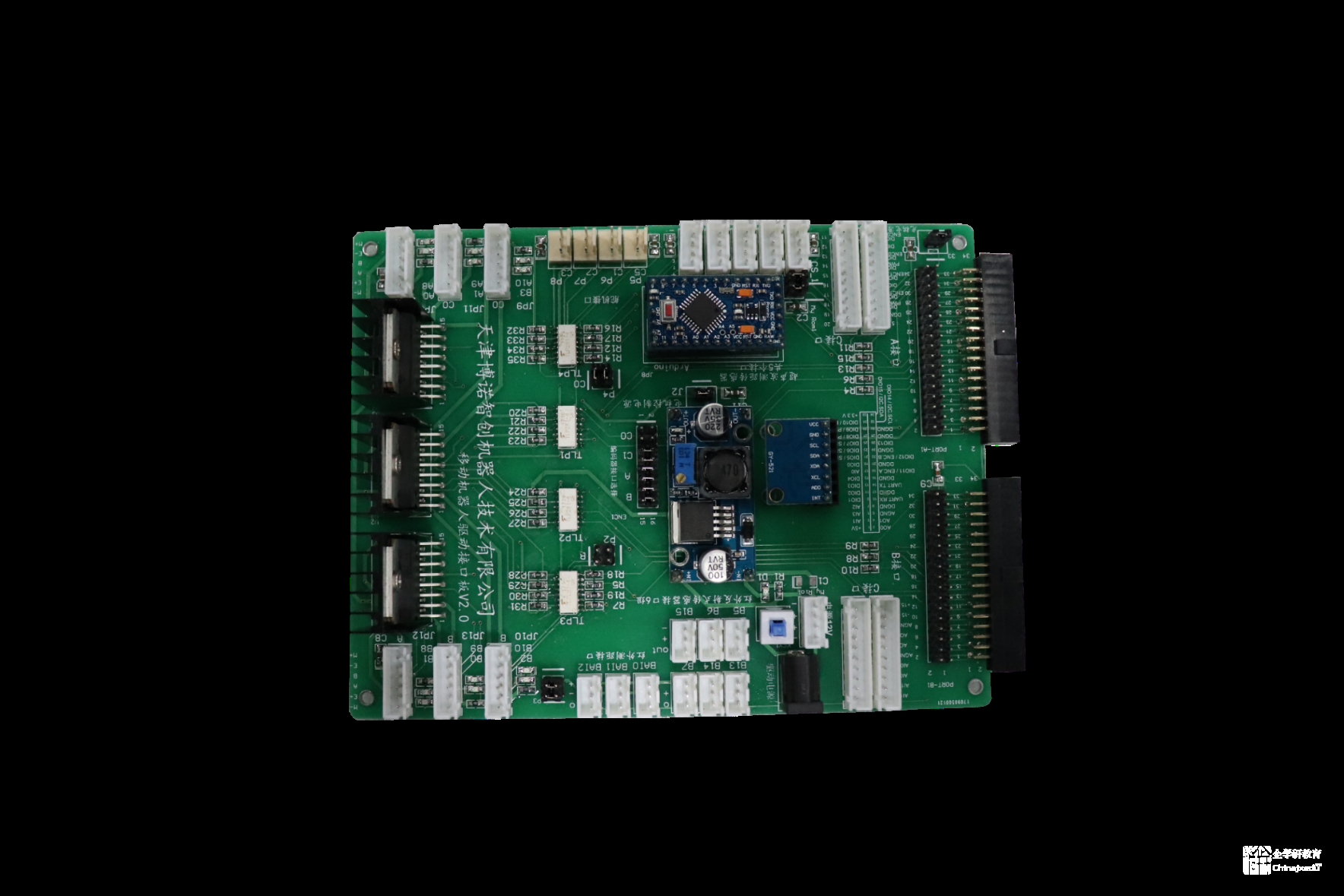
圖3 控制板實物圖
10.支架和結構組件
彈簧聯軸器(外徑19長25孔徑6-8),無油軸套(外徑10內徑8),滾珠絲杠(帶螺母)1204長270,淺茶色半透明有機玻璃板180×240×3,螺絲(M3×10mm),螺絲(M3×6mm),螺絲(M3×8mm),尼龍防松螺母M3,內六角扳手3mm,內六角扳手2.5mm,內六角扳手2mm,扳手5.5mm,3D打印固定件一組,電機固定支架4個,U型鋁型材車身底盤配件,機械手爪配件一套,手爪提升機構一套;
11.配套移動機器人教材和教學視頻,可滿足1.LabVIEW圖形化編程軟件的使用,2.myRIO功能IO基本使用,3.機械結構的搭建,4.直流電機閉環PID調速,5.myRIO控制器開發,6.ARM與FPGA的使用練習,7.移動機器人場地分揀,8.移動機器人視覺識別等實訓要求。
七、成績評定
采用過程評價與結果評價相結合、能力評價與職業素養評價相結合的方式。競賽項目滿分為100分,具體評分細則如表4所示。
表4 競賽項目配分表
| 項目 |
任務一 |
任務二 |
任務三 |
任務四 |
職業素養 |
答辯
展示 |
| 學生組 |
20 |
20 |
20 |
20 |
10 |
10 |
| 教師組 |
15 |
15 |
15 |
15 |
10 |
30 |
| 任務一:移動機器人整體裝調 |
| 序號 |
裝調任務要求 |
分值 |
| 學生 |
教師 |
| 1 |
移動平臺輪系正確安裝,螺釘緊固 |
2 |
2 |
| 2 |
傳感器支架安裝與調整 |
2 |
1 |
| 3 |
導軌安裝與調整 |
2 |
2 |
| 4 |
絲杠及其連接部分的安裝 |
2 |
1 |
| 5 |
提升電機單元安裝與絲杠調整 |
2 |
1 |
| 6 |
myRIO控制器支撐底板的安裝 |
2 |
1 |
| 7 |
舵機安裝 |
2 |
1 |
| 8 |
手爪安裝 |
2 |
2 |
| 9 |
電氣線路連接 |
2 |
2 |
| 10 |
網絡通信地址設置 |
2 |
2 |
| 合計 |
20 |
15 |
| 任務二:移動機器人運動控制調試 |
| 序號 |
在工作臺上的機器人性能要求 |
分值 |
| 學生 |
教師 |
| 驅動電機性能要求 |
| 1 |
驅動電機方向控制:正向/反向旋轉 |
2 |
1 |
| 2 |
驅動電機速度控制:慢速/快速旋轉 |
2 |
1 |
| 3 |
機器人直線運動控制:前進/后退 |
2 |
1 |
| 4 |
機器人轉向運動控制:左轉/右轉 |
2 |
1 |
| 5 |
機器人平移運動控制:左平移/右平移 |
2 |
1 |
| 信息采集系統性能 |
| 6 |
超聲測距傳感器和紅外傳感器 |
2 |
2 |
| 7 |
手柄的調試界面與通信 |
2 |
2 |
| 8 |
視覺系統(圖像采集) |
2 |
2 |
| 針對目標物體的性能 |
| 9 |
手爪張開/夾緊 |
2 |
2 |
| 10 |
手臂上升/下降 |
2 |
2 |
| 合計 |
20 |
15 |
| 任務三:移動機器人系統聯調 |
| 序號 |
評分項目 |
分值 |
| 學生 |
教師 |
| 1 |
使移動機器人自動完成沿U型走廊行走,且不碰到走廊與前、后端墻壁 |
5 |
3 |
| 2 |
智能視覺系統完成對目標球的顏色識別與二維碼識別 |
5 |
4 |
| 3 |
移動機器人自動完成尋找固定位置放置臺球并抓取 |
5 |
4 |
| 4 |
移動機器人自動完成將臺球放置指定位置,并返回場地 |
5 |
4 |
| 合計 |
20 |
15 |
| 任務四:場地任務 |
| 序號 |
評分項目 |
分值 |
| 學生 |
教師 |
| 1 |
遙控移動機器人完成任務 |
10 |
7 |
| 2 |
移動自動完成工作任務 |
10 |
8 |
| 合計 |
20 |
15 |
| 任務五:職業素養 |
| 序號 |
評分項目 |
分值 |
| 1 |
公平競賽,遵守賽場紀律 |
2 |
| 2 |
操作規范,無事故 |
2 |
| 3 |
著裝規范整潔,愛護設備,保持競賽環境清潔有序 |
2 |
| 4 |
團隊分工合理,冷靜、高效,一絲不茍 |
2 |
| 5 |
工具的使用符合工業安全 |
2 |
| 合計 |
10 |
| 任務六:答辯展示 |
| 序號 |
評分項目 |
分值 |
| 學生 |
教師 |
| 1 |
功能和結構 |
1 |
3 |
| 2 |
使用價值 |
1 |
3 |
| 3 |
節約成本 |
1 |
3 |
| 4 |
人性化設計 |
1 |
3 |
| 5 |
團隊合作 |
1 |
3 |
| 6 |
事故預防 |
1 |
3 |
| 7 |
環保性 |
1 |
3 |
| 8 |
創造性 |
1 |
3 |
| 9 |
答辯展示效果 |
2 |
6 |
| 合計 |
10 |
30 |
| |
|
|
|
|
|
|
|
|
|
|
|
完整版技術規程下載請點擊:http://www.0898px.com/uploadfile/2019/0303/20190303091149276.pdf

